Development of a Long-Range Autonomous UAV for GNSS-Denied Environments
Hybrid Aerospace Amynetron GmbH successfully participated in the SPRIND-Funke Challenge – Fully Autonomous Flight with the UAV Hypogriff. The goal was to develop an autonomous aircraft with optimized energy efficiency for 1-hour flight time, high-precision sensor technology for object detection and collision avoidance to navigate between buildings and vegetation, and a powerful software architecture for autonomous flight navigation without GNSS support.
Technological Features of the Hypogriff UAV
- Structure and Material Science: The structural components were 90% additively manufactured using FDM printing. This allowed for quick and particularly lightweight production of parts. Both particularly lightweight and resilient materials were used, as well as short fiber-reinforced filaments for increased strength and stiffness requirements.
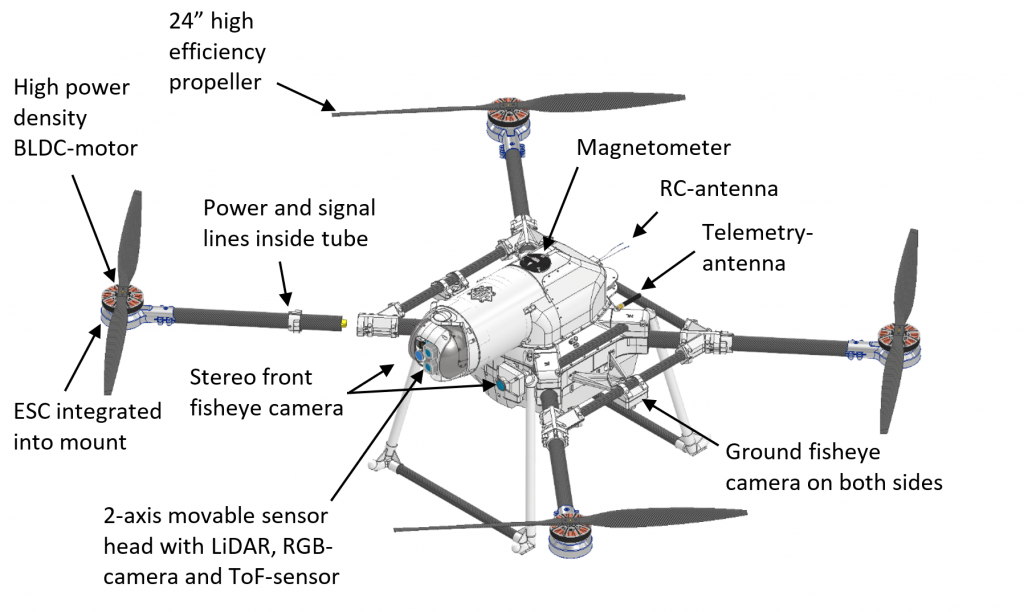
- Propulsion Efficiency: The required flight time of 1 hour posed a significant challenge to the propulsion system. At the same time, the computer systems and sensors for autonomous navigation represent an additional payload. The 24” propellers take up 2/3 of the UAV’s wingspan and achieve high thrust efficiency.
- Modularity and System Integration: Detachable design to minimize packing volume (50x50x25 cm) and increase logistical efficiency. The 21.6 Ah battery pack can be easily and quickly replaced via a quick-release mechanism.
Software for Autonomous Navigation
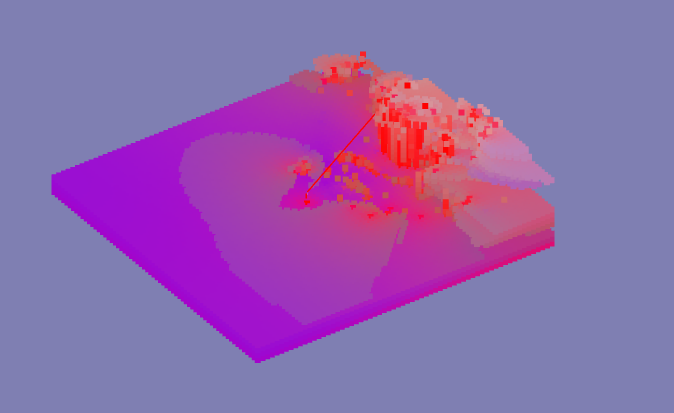
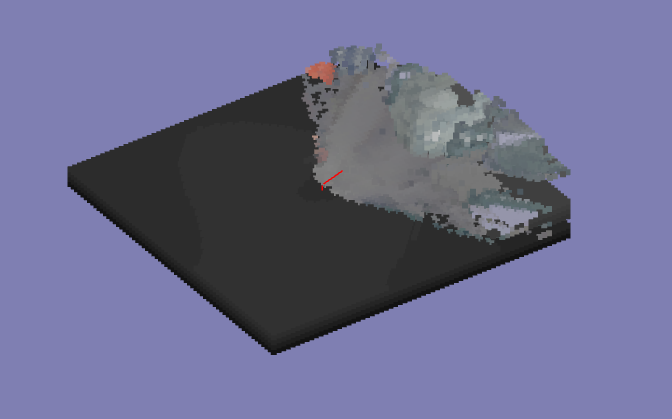
- Sensor Fusion for Autonomous Navigation: Integration of various sensors for high-precision environmental detection and GNSS-independent positioning. Onboard systems for real-time data analysis and implementation of machine learning methods.
- Improvement of Navigation Algorithms: Development of a robust sensor fusion strategy that integrates various data sources.
- AI-based Object Recognition: Implementation of AI to perform semantic classifications in real-time and optimize target recognition.
- Positioning via Optical Flow: Downward-facing cameras extract features and match them to achieve precise positioning.


Result and Challenge
The challenge took place at Fliegerhorst Erding. The UAVs were required to autonomously navigate a 6 km course between buildings and former hangars, across the runway, through a forested area, and abandoned building complexes. At the end of the course, a 1 kg box had to be autonomously picked up and brought back to the starting zone. Additionally, the drones were disrupted by water or smoke.
The Hypogriff from Hybrid Aerospace demonstrated its superior flight characteristics and was the only aircraft able to fly without issues in any weather. Hybrid Aerospace participated in the race and showcased the impressive ability to navigate through the complex environment at an altitude of about 3 to 5 meters. However, it must be noted that the reliability of the systems was not sufficient, and manual intervention was required at regular intervals. Ultimately, a small error led to a crash, and further flight was no longer possible.


Conclusion and Outlook
With the Hypogriff UAV, a high-performance, autonomously operating aircraft has been developed that impresses with innovative design, advanced sensor technology, and powerful algorithms. The successful participation in the challenge demonstrates the scientific and technological competence of the development team and paves the way for future research projects and commercial applications.